【多目标最优化】理论
🗓 2018年05月27日 📁 文章归类: 0x56_最优化
版权声明:本文作者是郭飞。转载随意,标明原文链接即可。
原文链接:https://www.guofei.site/2018/05/27/mop.html
多目标最优化通常记为 MOP(multiobjective programming)
是研究多于一个的目标函数在给定区域上的最优化
定义
$\min\limits_{x\in D} (f_1(x), f_2(x),…, f_p(x))$
$x_0\in D$,如果$\exists x’ \in D$,使得$f_k(x’)<f_k(x_0), k=1,2,…,p$,称$x_0$为 劣解
$x_0\in D$,如果不存在$x’ \in D$,使得$f_k(x’) \leq f_k(x_0), k=1,2,…,p$,称$x_0$为 有效解
$x_0\in D$,如果不存在$x’ \in D$,使得$f_k(x’) < f_k(x_0), k=1,2,…,p$,称$x_0$为 弱有效解
解法1:权重法
按照每一项的重要程度,赋予权重
$\min\limits_{x\in D} \sum\limits_{i=1}^p \lambda_i f_i(x)$
解法2:分层排序法
将目标函数按其重要程度排成一个次序,然后分别在前一个目标函数的最优解集中,求出后一个目标函数的最优解集。如此便可以转化成p个单目标最优化问题。
解法2的变种
不是求前一个目标函数的最优解集,而是允许一定偏差的集合
stable matching
这是一个讲座中听到的模型,首先定义一下可行解和有效边界。
- attainable region
- 可行解,约束条件所定义的集合,这里我们期望集合是凸的
- efficient frontier
- 可行解集合的边界
一个容易理解的事实:如果去掉约束条件后求得的最优点不在可行解内,
那么加权法或分层排序法所得到的解一定在efficient frontier上。并且加权法不同的权重对应efficient frontier上不同的点。
工业界具体应用时往往对权重存在争议,也就是对efficient frontier 上哪个点作为最优解存在争议。
算法1
找一个 Utopai Point ,定义 efficient frontier 上,距离 Utopai Point 最近的点作为最优点(起名为 compromise solution)。
(其中,距离可以使用$l_p$距离)
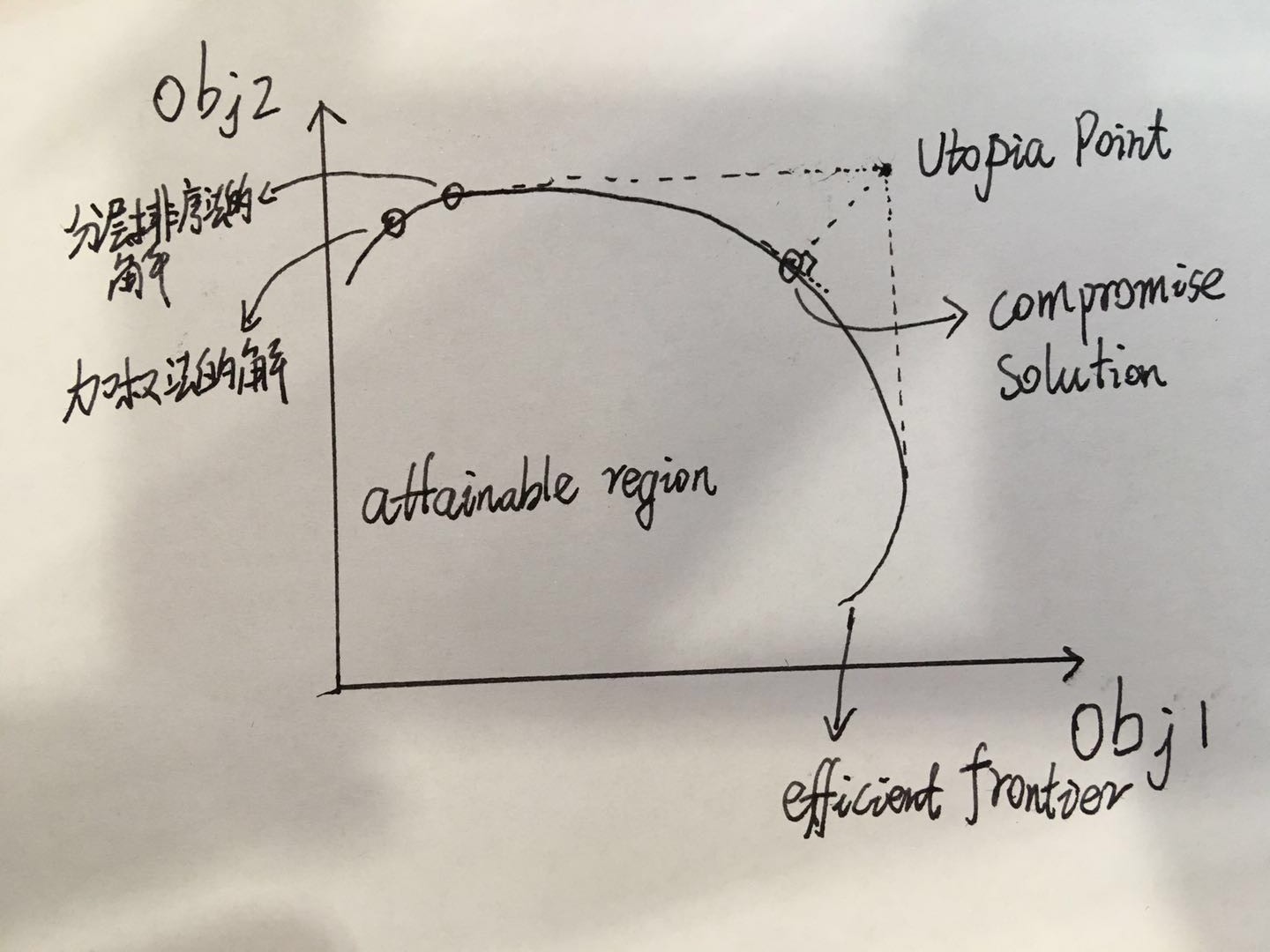
模型1的示意图
Utopai Point 有两种计算方案
各个最大法
在约束下,分别求$\max f_i$
得到$(f_1^* , f_2^* ,f_3^* ,…, f_n^* )$,这个点作为Utopai Point
业务法
从业务逻辑出发,给出每一个指标$f_i$的最理想的值。
得到$(f_1^* , f_2^* ,f_3^* ,…, f_n^* )$,这个点作为Utopai Point
算法2
此模型可以应用于动态过程,s为期数,当前为第t期,已知过去t-1期的情况。
$D_k(s)=U_k-f_k(x(s)), \forall k,s$
其中,k是指第k个方程,s指第s期
$U_k$是 Utopai Point,$f_k$是第k个目标
$w_k(t)=\dfrac{1}{t-1}\sum\limits_{s=1}^{t-1}D_k(s)$
$w_k^+(t)=\max(0,w_k(t))$
目标函数是$max \sum\limits_{k=1}^K w_k^+(t) f_k(x(t))$
直观理解这种算法,就是某一项接近理想目标时,其权重变小。
参考资料
施光燕:《最优化方法》,高等教育出版社
龚纯:《Matlab最优化计算》,电子工业出版社
David R. Anderson :《数据、模型与决策–管理科学篇》,机械工业出版社
您的支持将鼓励我继续创作!
